xf task 协程调度器详解
作者
kirto
本文主要说明,xf task的功能、移植和使用。
xf_task 介绍
背景
在嵌入式系统中,任务调度是系统运行的核心。场景的调度方式有抢占式和协作式。 抢占式调度是大多数实时操作系统(RTOS)采用的方式,能够中断正在运行的任务切换到优先级更高的任务,适用于对实时性要求高的场景。 但实现较为复杂,容易引发资源竞争,每个任务的开销大也是其无法适用于更加极限的嵌入式环境中。 相比之下,协作式调度在任务主动让出 CPU 控制权时进行切换。其实现简单、切换开销小,更容易避免资源竞争问题。 尽管市面上绝大多数 RTOS 以抢占式调度为主,但在许多低功耗和资源受限的场景中,协作式调度的优势往往更加重要。
介绍
xf_task 是 XFusion 的一个核心功能。其本身是一个轻量级协作式调度器。可以跑在多线程的环境下也可以跑在裸机的环境中。 相比于RTOS,其本身的占用仅仅需要 2.5k (keil ac5 编译得出)左右,且创建一个 ntask 任务仅仅需要 96B 的大小。 xf_task 实现了三种任务:ctask(有栈协程)、 ntask(无栈协程)和 ttask (定时器任务) ctask 提供了上下文保存,使用体验上无限接近于线程。 ntask 提供了非常轻量的任务方式,非常适合资源受限的嵌入式设备。 ttask 提供了软件定时器的拓展。
功能
xf task支持非常丰富的功能,这些功能后续会一一进行详细介绍:
- 协作式调度,支持裸机移植,支持多线程中构造多个调度器 裸机和多线程中移植
- 支持三种种任务,ttask (定时任务)、ntask(无栈协程)、ctask (有栈协程)三种任务用法
- 移植简单,ttask、ntask 仅需对接时间戳的获取。ctask 对接上下文的创建和切换函数(可通过宏屏蔽)xf_task 配置项详解
- 支持协作式优先级 优先级机制
- 支持两种消息队列,queue和ctask_queue 消息队列机制
- 支持任务触发机制 时间触发和事件触发
- 支持紧急任务 紧急任务机制
- 支持任务饥饿度机制 任务饥饿与饥饿度
- 支持 mbus 发布订阅机制 同步/异步的发布订阅机制
- 支持任务池机制 任务池和任务回收机制
- 仅依赖 xf_utils, 支持 c99
开源地址
github 开源地址:https://github.com/x-eks-fusion/xf_task
gitee 开源地址:https://gitee.com/x-eks-fusion/xf_task
原理介绍
调度器原理
调度流程图
mermaid
graph LR
F["任务创建"]
A["就绪态(链表数组)"]
B["阻塞态(链表)"]
C["运行态(指针)"]
D["删除态(链表)"]
E["挂起态(链表)"]
F --> B
subgraph Box [调度器]
direction LR
A --> B
B --> C
C --> A
E -.-> B
D
end调度流程解析
源码位置
调度部分的代码主要是在 src/kernel/xf_task_manager.c 文件的 void xf_task_manager_run(xf_task_manager_t manager) 函数中。
调度流程
- 任务创建:
- 不同的任务创建过程并不相同。但是它们共同继承 xf_task_base_t 基类
- 无论什么任务,创建后会进入阻塞态
- 阻塞态:
- 通过handle的虚函数,不同的任务有不同的阻塞条件处理函数。
- ctask和ntask由于无阻塞条件,所以自动进入就绪态。后续遇到delay等函数才会带着阻塞条件(时间或事件)再次进入阻塞态
- ttask会经过一次delay时间后,从阻塞态过度到就绪态
- 此外这里会对比所有时间条件的最小值,这将为后续的空闲任务提供最大的休息时间
- 就绪态:
- 就绪态会从高到低不同优先级(数值越小优先级越高)找到可执行的任务并让其进入运行态。
- 就绪态找到了可以运行的任务后就不会继续遍历
- 如果没有就绪任务,则会再次更新阻塞态中时间最小值,并将其作为空闲任务最大休息时间传递给空闲任务。后运行空闲任务。空闲任务运行完毕进入下一次调度
- 运行态:
- 运行态中的不同任务进行运行不同的exec的虚函数
- 运行完毕则再度进入下一次调度
- 挂起态:
- 挂起态时用户自己主动挂起不希望运行的任务。当挂起任务出于阻塞态时,挂起的时间将不会算入阻塞时间。
- 挂起的任务不会进入调度器,除非用户手动释放。
- 释放后的任务进入阻塞态,再次参与调度。
- 删除态:
- 当任务被删除时,不会立即删除。第一时间将会被放入删除态中。
- 删除态真正的处理会在调度器进入空闲之前,统一被释放掉。
- 在内存池中,任务的删除态被替换为内存池回收函数。以便后续重复利用。
对象及继承关系
继承关系图
mermaid
classDiagram
%% 虚函数表结构
class xf_task_vfunc_t {
+xf_task_create_t constructor
+xf_task_reset_t reset
+xf_task_update_t update
+xf_task_exec_t exec
}
%% 任务基类
class xf_task_base_t {
+xf_list_t node
+xf_task_manager_t manager
+xf_task_func_t func
+void *arg
+uint32_t type
+uint32_t state
+uint32_t flag
+uint32_t signal
+uint32_t priority
+uint32_t delay
+xf_task_time_t wake_up
+xf_task_time_t suspend_time
+int32_t timeout
+const xf_task_vfunc_t *vfunc
+xf_task_delete_t delete
}
%% 循环任务
class xf_ttask_handle_t {
+uint32_t count
+uint32_t count_max
}
%% 条件任务
class xf_ntask_handle_t {
+xf_ntask_compare_func_t compare
+xf_ntask_status_t status
+xf_list_t lc_list
+xf_list_t args_list
}
%% 协作任务
class xf_ctask_handle_t {
+size_t stack_size
+xf_task_context_t context
+void *stack
+xf_list_t queue_node
}
%% 任务调度器
class xf_task_manager_handle_t {
+xf_task_t current_task
+xf_task_t urgent_task
+xf_list_t ready_list
+xf_list_t blocked_list
+xf_list_t suspend_list
+xf_list_t destroy_list
+xf_task_on_idle_t on_idle
+xf_list_t hunger_list
+xf_task_context_t context
}
%% 继承关系
xf_ttask_handle_t --|> xf_task_base_t : inherits
xf_ntask_handle_t --|> xf_task_base_t : inherits
xf_ctask_handle_t --|> xf_task_base_t : inherits
%% 关联关系
xf_task_base_t --> xf_task_vfunc_t : uses
xf_task_base_t --> xf_task_manager_handle_t : belongs to不同对象的具体结构
这里采用了观察者模式来实现该功能,调度器对象 task_manager 不依赖具体的任务对象,转而依赖其基类 task_base 。这使得具体的 task 子类可以随意拓展,解耦了整体的逻辑结构。
task_base 对象
c
typedef struct _xf_task_base_t {
xf_list_t node; /*!< 任务节点,挂载在 manager 上 */
xf_task_manager_t manager; /*!< 保存 task 所属的 manager ,以便更快访问 manager */
xf_task_func_t func; /*!< 每个任务所执行的内容 */
void *arg; /*!< 任务中用户定义参数 */
uint32_t type: 2; /*!< 任务类型,见 @ref xf_task_type_t */
uint32_t state: 3; /*!< 任务状态,见 @ref xf_task_state_t */
uint32_t flag: 8; /*!< 任务标志位,外部设置的标志位,内部只会读取不会设置 */
uint32_t signal: 9; /*!< 任务间信号,内部传递消息使用,外部无法设置,
* 见 XF_TASK_SIGNAL_* 宏 */
uint32_t priority: 10; /*!< 任务优先级,具体最大值参考 @ref XF_TASK_PRIORITY_LEVELS */
uint32_t delay; /*!< 对类型于有上下文是延时时间,对于没有上下文则是定时周期 */
xf_task_time_t wake_up; /*!< 唤醒时间,通过延时时间计算而来 */
xf_task_time_t suspend_time; /*!< 挂起时间,挂起期间内的时间不会算入延时时间 */
int32_t timeout; /*!< 超时时间,正数为超时时间,负数则属于提前唤醒 */
const xf_task_vfunc_t *vfunc; /*!< 虚函数指针,由子对象实现具体操作。
* 虚函数指针是实现不同类型任务统一调度的关键 */
xf_task_delete_t delete; /*!< 虚函数指针,其内容通常为回收任务内存
* task pool 中通过替换它实现任务池回收任务 */
#if XF_TASK_HUNGER_IS_ENABLE
xf_list_t hunger_node; /*!< 饥饿节点,挂载在 manager 上的 hunger_list 上,
* 以便更快速的遍历饥饿任务 */
uint32_t hunger_time; /*!< 任务饥饿度,单位为 ms。超过该时间,任务爬升一个优先级 */
#endif
#if XF_TASK_USER_DATA_IS_ENABLE
void *user_data; /*!< 用户传递的参数 */
#endif // XF_TASK_USER_DATA_IS_ENABLE
} xf_task_base_t;提供了所有 task 的公共部分。其中比较重要的是这里定义了一个虚函数表 constructor, reset, update, exec。这就是每个子对象需要实现的虚函数。对于 task_manager 来说,操作的也是这 task 的公共部分。其余非公共部分通过虚函数来间接实现。
ttask 对象
c
typedef struct _xf_ttask_handle_t {
xf_task_base_t base; /*!< 继承父对象 */
uint32_t count; /*!< 记录 ttask 剩余循环次数 */
uint32_t count_max; /*!< 记录 ttask 循环次数上限 */
} xf_ttask_handle_t;继承于 task_base 对象。 除了这个对象之外,还需要实现一个注册函数 void xf_xxx_vfunc_register(void) 。 这里会通过 task 注册表 xf_task_reg.inc 自动生成。注册需要对接父函数的虚函数。定时器支持任意次数的循环和无限循环。
ntask 对象
c
typedef struct _xf_ntask_handle_t {
xf_task_base_t base; /*!< 继承父对象 */
xf_ntask_compare_func_t compare; /*!< 直到这个函数返回 0,会通过事件信号触发调度 */
xf_ntask_status_t status; /*!< 记录 ntask 退出状态 */
xf_list_t lc_list; /*!< 记录 ntask 上下文 */
xf_list_t args_list; /*!< 参数收集器 */
} xf_ntask_handle_t;继承于 task_base 对象。 除了这个对象之外,还需要实现一个注册函数 void xf_xxx_vfunc_register(void) 。 这里会通过 task 注册表 xf_task_reg.inc 自动生成。注册需要对接父函数的虚函数。 无栈协程实现,借鉴了 protothread 的实现。 通过 switch case 的封装实现了循环以及 delay 的功能。 支持任意层级的嵌套。
ctask 对象
c
typedef struct _xf_ctask_handle_t {
xf_task_base_t base; /*!< 继承 task_base 父对象 */
size_t stack_size; /*!< 任务上下文堆栈大小 */
xf_task_context_t context; /*!< 任务上下文对象 */
void *stack; /*!< 任务上下文堆栈地址 */
xf_list_t queue_node; /*!< 队列等待 */
} xf_ctask_handle_t;继承于 task_base 对象。相比无栈协程,该对象需要对接保存上下文和切换上下文的函数。而且用户需要提供 XF_TASK_CONTEXT_TYPE 上下文的对象类型。当然如果你觉得移植困难,可以通过配置文件屏蔽 ctask 只用 ttask 和 ntask。
task_manager 对象
c
typedef struct _xf_task_manager_handle_t {
xf_task_t current_task; /*!< 当前执行任务 */
xf_task_t urgent_task; /*!< 紧急任务 */
xf_list_t ready_list[XF_TASK_PRIORITY_LEVELS]; /*!< 任务就绪队列 */
xf_list_t blocked_list; /*!< 任务阻塞队列 */
xf_list_t suspend_list; /*!< 任务挂起队列,挂起任务不参与调度,需要手动恢复 */
xf_list_t destroy_list; /*!< 任务销毁队列,进行异步销毁 */
xf_task_on_idle_t on_idle; /*!< 空闲任务回调 */
#if XF_TASK_HUNGER_IS_ENABLE
xf_list_t hunger_list; /*!< 任务饥饿队列,达到其指定值进行跳跃 */
#endif // XF_TASK_HUNGER_IS_ENABLE
#if XF_TASK_CONTEXT_IS_ENABLE
xf_task_context_t context; /*!< 调度器上下文 */
#endif // XF_TASK_CONTEXT_IS_ENABLE
} xf_task_manager_handle_t;位于 kernel 文件夹内,用于调度任务的运行。默认有 default_manager。不同线程中可以创建独立的 task_manager , 对应的函数都有 xxx_with_manager 版本。
功能详解
三种任务的用法
ttask、ntask、ctask三种任务本质上都是异步的,只不过为了更方便用户的同步使用习惯而封装更像是写“裸机”。
异步调用 ttask
c
#include "xf_task.h"
#include <stdio.h>
static void task(xf_task_t task)
{
printf("hello ttask");
}
void app_main()
{
// 创建任务
xf_ttask_create(task, (void *)1, 1, 1000, 5);
// 创建无限循环任务
xf_ttask_create_loop(task, (void *)2, 1, 2000);
}c
/**
* @brief 创建 ttask 循环任务。
*
* @param func ttask 任务执行的函数。
* @param func_arg 用户自定义执行函数参数。
* @param priority 任务优先级。
* @param delay_ms 任务延时周期,单位为毫秒。
* @return xf_task_t 任务对象,返回为 NULL 则表示创建失败
*/
xf_task_t xf_ttask_create_loop(xf_task_func_t func, void *func_arg, uint16_t priority, uint32_t delay_ms);
/**
* @brief 创建指定次数的 ttask 任务。
*
* @param func ttask 任务执行的函数。
* @param func_arg 用户自定义执行函数参数。
* @param priority 任务优先级。
* @param delay_ms 任务延时周期,单位为毫秒。
* @param count 任务循环的次数上限。
* @return xf_task_t 任务对象,返回为 NULL 则表示创建失败
*/
xf_task_t xf_ttask_create(xf_task_func_t func, void *func_arg, uint16_t priority, uint32_t delay_ms, uint32_t count);优点:
- 周期性任务很方便
- 创建任务的开销非常小
- 可以选择多次循环还是无限循环
- 移植难度简单
缺点:
- 遇到非周期任务,使用起来很麻烦。异步的逻辑构思很麻烦。
- 不允许出现 delay 等阻塞函数。
同步调用 ctask
c
#include "xf_task.h"
#include <stdio.h>
static void task(xf_task_t task)
{
// 获取任务参数
while (1) {
printf("hello ctask");
// 使用 ctask 专属延时函数
xf_ctask_delay(1000);
}
}
void app_main()
{
// 创建任务
xf_ctask_create(task, (void *)1, 1, 1024);
}c
/**
* @brief 创建 ctask 任务。
*
* @param func ctask 任务执行的函数。
* @param func_arg 用户自定义执行函数参数。
* @param priority 任务优先级。
* @param stack_size 任务上下文堆栈大小。
* @return xf_task_t 任务对象,返回为 NULL 则表示创建失败
*/
xf_task_t xf_ctask_create(xf_task_func_t func, void *func_arg, uint16_t priority, size_t stack_size);优点:
- 创建大循环,并且可以调用 delay 等阻塞函数。
- 嵌套非常方便,不需要修改原有函数。
- 同步调用思维,更加贴近裸机的调用习惯。
缺点:
- 单个任务的开销比较大,不适合多次创建。
- 需要额外移植保存上下文,移植难度较大。
更加轻量级的同步调用 ntask
c
#include "xf_task.h"
#include <stdio.h>
static void task(xf_task_t task)
{
XF_NTASK_BEGIN(task);
while (1) {
printf("hello ntask\n");
// ntask 专属延时
xf_ntask_delay(1000);
}
XF_NTASK_END();
}
void app_main()
{
// 创建任务
xf_ntask_create(task, (void *)1, 1);
}c
/**
* @brief 创建无栈协程
*
* @param manager 任务调度器
* @param func 任务执行函数
* @param func_arg 任务参数
* @param priority 任务优先级
* @return xf_task_t 任务对象,NULL 表示创建失败
*/
xf_task_t xf_ntask_create(xf_task_func_t func, void *func_arg, uint16_t priority);优点:
- 创建大循环,并且可以调用 delay 等阻塞函数。
- 同步调用思维,更加贴近裸机的调用习惯。
- 单个任务开销很小。
- 移植难度简单。
缺点:
- 不能保存临时变量,需要借助到变量池。
- 可以嵌套,但是需要修改原有的函数。
task_manager 的函数及其用法
task_manager 任务管理器,主要的作用就是参与调度。其 xf_task_manager_run 函数需要被放到无限循环中。 裸机中,我们一般只有一个 task_manager ,于是,封装了一个 default_task_manager 简化了调用的管理器参数的传入。 任务管理器支持 Tickless 模式,可以通过空闲函数的参数(最大空闲时间)进行休眠。休眠器件 SysTick 会不起作用。所以我们提供了补偿函数,用户通过 RTC 等手段记录休眠真实时间,然后通过调用补偿函数,对现有的任务进行补偿。以此达到空闲时休眠的效果。
API 展示
任意任务管理器操作函数
- 创建任务管理器:
C
xf_task_manager_t xf_task_manager_create(xf_task_on_idle_t on_idle);- 设置 manager 的空闲回调函数:
C
xf_err_t xf_task_manager_set_idle(xf_task_manager_t manager, xf_task_on_idle_t on_idle);- 启动任务管理器调度任务:
C
void xf_task_manager_run(xf_task_manager_t manager);- 为任意任务管理器紧急任务:
C
xf_err_t xf_task_set_urgent_task_with_manager(xf_task_manager_t manager, xf_task_t task, bool force);- 为任意任务管理器设置时间补偿:
C
xf_err_t xf_task_manager_set_compensation_time(xf_task_manager_t manager, xf_task_time_t time_ms);默认任务管理器操作函数
- 创建默认的任务管理器:
C
xf_err_t xf_task_manager_default_init(xf_task_on_idle_t on_idle);- 置默认任务管理器的空闲回调函数:
C
xf_err_t xf_task_manager_set_default_idle(xf_task_on_idle_t on_idle);- 获取默认的任务管理器:
C
xf_task_manager_t xf_task_get_default_manager(void);- 启动任务管理器调度任务:
C
void xf_task_manager_run_default(void);- 为默认任务管理器紧急任务:
C
xf_err_t xf_task_set_urgent_task(xf_task_t task, bool force);- 为默认任务管理器设置时间补偿:
C
xf_err_t xf_task_manager_set_compensation_time_default(xf_task_time_t time_ms);其它操作函数
- 获取管理器运行的任务:
C
xf_task_t xf_task_manager_get_current_task(xf_task_manager_t manager);- 设置当前任务为就绪态:
C
xf_err_t xf_task_manager_task_ready(xf_task_manager_t manager, xf_task_t task);- 设置当前任务为挂起态:
C
xf_err_t xf_task_manager_task_suspend(xf_task_manager_t manager, xf_task_t task);- 设置当前任务为删除态:
C
xf_err_t xf_task_manager_task_destory(xf_task_manager_t manager, xf_task_t task);- 设置当前任务为阻塞态:
C
xf_err_t xf_task_manager_task_blocked(xf_task_manager_t manager, xf_task_t task);task_base 的函数及其用法
task_base 是 ttask、ntask、ctask的基类,所以它的函数方法可以给这三个子类使用。 但是子类的函数方法是不能通用的。
API 展示
任务调度相关函数
- 删除任务:
C
void xf_task_delete(xf_task_t task);- 重置任务:
C
void xf_task_reset(xf_task_t task);- 挂起任务:
C
xf_err_t xf_task_suspend(xf_task_t task);- 恢复任务:
C
xf_err_t xf_task_resume(xf_task_t task);- 触发任务:
C
xf_err_t xf_task_trigger(xf_task_t task);查询任务
- 查询任务状态:
C
xf_task_state_t xf_task_get_state(xf_task_t task);- 查询任务类型:
C
xf_task_type_t xf_task_get_type(xf_task_t task);- 查询任务优先级:
C
uint16_t xf_task_get_priority(xf_task_t task);- 查询任务超时:
C
int32_t xf_task_get_timeout(xf_task_t task);- 查询任务所属调度器:
C
xf_task_manager_t xf_task_get_manager(xf_task_t task);- 查询任务传入参数:
C
void *xf_task_get_arg(xf_task_t task);设置任务
- 设置任务延时:
C
xf_err_t xf_task_set_delay(xf_task_t task, uint32_t delay_ms);- 设置任务优先级:
C
xf_err_t xf_task_set_priority(xf_task_t task, uint16_t priority);- 设置任务执行函数:
C
xf_err_t xf_task_set_func(xf_task_t task, xf_task_func_t func, void *arg);饥饿值机制相关
这部分需要设置 XF_TASK_HUNGER_ENABLE 为 1
- 启用并设置任务饥饿值:
C
void xf_task_feel_hungery_enable(xf_task_t task, uint32_t hunger_time);- 禁用任务饥饿值:
C
void xf_task_feel_hungery_disable(xf_task_t task);user_data 相关
这部分需要设置 XF_TASK_USER_DATA_ENABLE 为 1
- 设置任务 user_data:
C
xf_err_t xf_task_set_user_data(xf_task_t task, void *user_data);- 查询任务 user_data:
C
void *xf_task_get_user_data(xf_task_t task);ttask 的函数及其用法
ttask 的本身函数是形如 xxx_with_manager 结构。在多线程多协程的环境中,可以跑在不同的任务管理器中。 多线程环境下,一个线程跑一个任务管理器,跨任务管理器的通讯需要用线程间通讯 详见:多线程移植 但在裸机环境或者多线程中只用一个线程跑协程的环境下,就可以直接使用不带 _with_manager 的函数,简化了函数的调用。 ttask 的延时时间为 0 的时候,ttask将会变成一个纯事件触发的任务。只有调用 xf_task_trigger() 函数才能被执行。
API 展示
任意任务管理器的函数操作
- 创建指定次数的定时器任务:
C
xf_task_t xf_ttask_create_with_manager(xf_task_manager_t manager,
xf_task_func_t func,
void *func_arg,
uint16_t priority,
uint32_t delay_ms,
uint32_t count);- 创建无限循环的定时器任务:
C
xf_task_t xf_ttask_create_loop_with_manager(xf_task_manager_t manager,
xf_task_func_t func,
void *func_arg,
uint16_t priority,
uint32_t delay_ms);默认任务管理器的函数操作
- 创建指定次数的定时器任务:
C
xf_task_t xf_ttask_create(xf_task_func_t func, void *func_arg, uint16_t priority, uint32_t delay_ms, uint32_t count);- 创建无限循环的定时器任务:
C
xf_task_t xf_ttask_create_loop(xf_task_func_t func, void *func_arg, uint16_t priority, uint32_t delay_ms);其它 ttask 专属操作函数
- 设置 ttask 循环次数:
C
xf_err_t xf_ttask_set_count(xf_task_t task, uint32_t count);- 查询 ttask 剩余循环次数:
C
uint32_t xf_ttask_get_count(xf_task_t task);- 设置 ttask 总循环次数:(此函数需要配合任务复位才能生效)
C
xf_err_t xf_ttask_set_count_max(xf_task_t task, uint32_t count_max);当任务初始化的时候,count_max 和 count 会被设置成循环次数。此后 count_max 记录一开始设置的循环次数,用于复位时重置循环次数。count 则是实际剩余循环次数。 当任务的 count 到达 0 后,任务会被自动丢入删除态进行销毁。
ctask 的函数及其用法
ctask 保存了上下文。任务在创建后即可进入就绪态运行。如果遇到 xf_ctask_delay 或者是 xf_ctask_queue_xxx 相关的 API 则进入阻塞态。 ctask 的专属消息队列相比普通消息队列多了一个超时的功能。使得消息队列在等待的情况下不耽误其余任务的运行。
API 展示
任意任务管理器的函数操作
- 创建有栈协程:
C
xf_task_t xf_ctask_create_with_manager(xf_task_manager_t manager,
xf_task_func_t func,
void *func_arg,
uint16_t priority,
size_t stack_size);- ctask 延时函数:
C
void xf_ctask_delay_with_manager(xf_task_manager_t manager, uint32_t delay_ms);- ctask 消息队列创建:
C
xf_ctask_queue_t xf_ctask_queue_create_with_manager(xf_task_manager_t manager,
const size_t size,
const size_t count);默认任务管理器的函数操作
- 创建有栈协程:
C
xf_task_t xf_ctask_create(xf_task_func_t func, void *func_arg, uint16_t priority, size_t stack_size);- ctask 延时函数:
C
void xf_ctask_delay(uint32_t delay_ms);- ctask 消息队列创建:
C
xf_ctask_queue_t xf_ctask_queue_create(const size_t size, const size_t count);其它 ctask 专属操作函数
- ctask 消息队列发送:
C
xf_err_t xf_ctask_queue_send(xf_ctask_queue_t queue, void *buffer, uint32_t timeout);- ctask 消息队列接收:
C
xf_err_t xf_ctask_queue_receive(xf_ctask_queue_t queue, void *buffer, uint32_t timeout);ntask 的函数及其用法
ntask 与 ctask 不同的是,它需要在任务函数中开头结尾加入 XF_NTASK_BEGIN(task) 和 XF_NTASK_END()。 此外,ntask 支持嵌套:
c
#include "xf_task.h"
#include <stdio.h>
xf_async_t test(xf_task_t task, int a)
{
XF_NTASK_BEGIN(task);
xf_ntask_delay(1000);
printf("hello ntask\n");
XF_NTASK_END();
}
static void task(xf_task_t task)
{
XF_NTASK_BEGIN(task);
while (1) {
xf_await(test(task, 1));
}
XF_NTASK_END();
}
void app_main()
{
// 创建任务
xf_ntask_create(task, (void *)1, 1);
}如上述例程,如果希望嵌套的函数调用 ctask 专属函数,需要这样才能使用。
API 展示
任意任务管理器的函数操作
- 创建无栈协程任务:
C
xf_task_t xf_ntask_create_with_manager(xf_task_manager_t manager,
xf_task_func_t func,
void *func_arg,
uint16_t priority);默认任务管理器的函数操作
- 创建无栈协程任务:
C
xf_task_t xf_ntask_create(xf_task_func_t func, void *func_arg, uint16_t priority);无栈协程变量池
由于无栈协程无法保留临时变量,除了使用静态和全局变量之外。ntask提供一个由键值对设置的变量池机制。 用于在 ntask 里面保存变量。
- 变量池中获取整数:
C
int xf_ntask_args_get_int(xf_task_t *task, const char *name);- 变量池中获取浮点数:
C
float xf_ntask_args_get_float(xf_task_t *task, const char *name);- 变量池中获取数组:
C
void *xf_ntask_args_get_array(xf_task_t *task, const char *name);- 变量池中保存整数:
C
xf_err_t xf_ntask_args_set_int(xf_task_t *task, const char *name, int value);- 变量池中保存浮点数:
C
xf_err_t xf_ntask_args_set_float(xf_task_t *task, const char *name, float value);- 变量池中保存数组:
C
xf_err_t xf_ntask_args_set_array(xf_task_t *task, const char *name, void *value, unsigned int size, unsigned int len);无栈协程专用宏函数
很多 API 实际上是通过宏进行封装,不建议自己进行调用。我们可以通过以下宏进行调用。
- 无栈协程开始宏:
C
XF_NTASK_BEGIN(ntask)- 无栈协程结束宏:
C
XF_NTASK_END()- 暂时跳出协程:
C
xf_ntask_yield()- 阻塞直到条件达成:
C
xf_ntask_until(compare_cb)- ntask 专属延时:
C
xf_ntask_delay(delay_ms)- 阻塞直到条件达成或超时:
C
xf_ntask_until_timeout(compare_cb, timeout_ms)- 结束并退出无栈协程:
C
xf_ntask_exit()- 嵌套调用无栈协程:
C
xf_await(func)xf_task 配置项详解
基本规则
文件夹结构规则
xf_task 的源码文件夹中,拥有四个子文件夹。其最外面有个 xf_task_config_internal.h 文件,在子文件夹也有对应的xxx_config.h,移植者需要自己写一个 xf_task_config.h 的配置文件,其依赖关系如下:
子文件夹源码 --> 子文件夹的 xxx_config.h --> xf_task_config_internal.h --> xf_task_config.h
子文件夹的 xxx_config.h 中包含了当前子文件夹所需要的宏的默认值。如果有不知道的配置,可以自行去这些文件中找到默认值,一般会有注释。
xf_task_config_internal.h 一方面方便集中引入用户的配置文件 xf_task_config.h。另一方面,如果有跨不同子文件夹的公共配置,默认值将会被放到这里。
如果你希望所有配置都是默认值,则创建一个空的 xf_task_config.h 即可。配置的项目会覆盖掉默认值。
基础配置宏规则
基础配置宏
c
// 相关功能注释
#ifndef XF_BUFEER_SIZE
#define XF_BUFEER_SIZE (10)
#endif- 一般的配置,我们会在 xxx_config.h 文件中配置一个默认值。以便在用户不配置该选项的情况下,代码能运行。
- 在其上方也会有解释型注释。方便用户的查询。
开关类配置宏
c
// 希望默认值为1
// 外部配置使用XF_ADC_ENABLE,内部调用使用XF_ADC_EN
#if !defined(XF_ADC_ENABLE) || (XF_ADC_ENABLE)
#define XF_ADC_IS_ENABLE (1) /* 默认配置 */
#else
#define XF_ADC_IS_ENABLE (0)
#endif
// 希望默认值为0
// 外部配置使用XF_ADC_ENABLE,内部调用使用XF_ADC_EN
#if !defined(XF_ADC_DISABLE) || (XF_ADC_DISABLE)
#define XF_ADC_IS_ENABLE (0) /* 默认配置 */
#else
#define XF_ADC_IS_ENABLE (1)
#endif- 开关宏,我们通常会隔离外部的配置。内部使用 XXX_IS_ENABLE 宏进行判断,外部使用 XXX_ENBALE 或 XXX_DISABLE 进行配置。
- 当默认值为 0 的时候,对外使用的是 XXX_DISABLE。默认值为 1 的时候,对外使用的是 XXX_ENBALE。用户可以很明显的了解到内部的默认配置。
数据类型类配置宏
c
// 外界配置 XF_HEAP_INTPTR_TYPE宏
#ifndef XF_HEAP_INTPTR_TYPE
#define XF_HEAP_INTPTR_TYPE intptr_t
#endif
// 内部 typedef 可以帮忙检查宏是不是类型
// 同时在书写中 typedef 修饰的类型在代码提示中会被识别成类型而不是宏
typedef XF_HEAP_INTPTR_TYPE xf_heap_intptr_t;- 数据类型的配置一般会形如 XXX_TYPE 。
数据限制宏
c
// 限定用户配置在 0-10 之间
#ifndef XF_TASK_LEVEL
#define XF_TASK_LEVEL (5)
#else
#if (XF_TASK_LEVEL < 0) || (XF_TASK_LEVEL > 10)
#error "task must be 0-10"
#endif
#endif- 当配置的为具体数值时,如果希望用户的配置是一个范围,则会按照如上方式进行限制
选项型配置
c
// XF_LOG_NEWLINE_LF 优先级大于XF_LOG_NEWLINE_CRLF 大于 XF_LOG_NEWLINE_NONE
// 都没定义则是"\n"
#ifdef XF_LOG_NEWLINE
#error "user cant define this macro"
#endif
#if defined(XF_LOG_NEWLINE_LF)
#define XF_LOG_NEWLINE "\n"
#elif defined(XF_LOG_NEWLINE_CRLF)
#define XF_LOG_NEWLINE "\r\n"
#elif defined(XF_LOG_NEWLINE_NONE)
#define XF_LOG_NEWLINE ""
#else
#define XF_LOG_NEWLINE "\n" // 什么都没定义的情况下默认配置
#endif- 选项类型的宏,如上述例子,用户可以通过定义,XF_LOG_NEWLINE_LF 或者 XF_LOG_NEWLINE_CRLF 或者 XF_LOG_NEWLINE_NONE 其中一个(多定义按照优先级来确定)。从而定义 XF_LOG_NEWLINE 的内容
- 用户不能直接定义 XF_LOG_NEWLINE 。防止用户定义奇怪的内容。
配置项
kernel 配置
配置宏: XF_TASK_PRIORITY_LEVELS
功能:配置任务最高优先级,1 ~ 1024 之间
默认值:24
配置宏: XF_TASK_HUNGER_ENABLE
功能:是否启用任务饥饿机制
默认值:1
配置宏: XF_TASK_USER_DATA_ENABLE
功能:是否启用 user_data
默认值:1
port 配置
配置宏: XF_TASK_TICKS_FREQUENCY
功能:对接定时器的滴答频率,单位为 Hz
默认值:1000
配置宏: XF_TASK_CONTEXT_TYPE
功能:设置上下文类型
默认值:无默认值,开启了 ctask 必须配置该选项
utils 配置
配置宏: XF_TASK_MBUS_ENABLE
功能:是否打开 MBUS 功能
默认值:1
配置宏: XF_TASK_POOL_ENABLE
功能:是否打开任务池功能
默认值:1
内部公共配置
配置宏: XF_TASK_CONTEXT_DISABLE
功能:是否打开 ctask
默认值:0
配置宏: XF_TASK_TIME_TYPE
功能:时间戳类型
默认值:uint64_t
优先级机制
与 RTOS 的优先级不同,由于 xf_task 是协作式调度。故不存在 RTOS 中的抢占优先级。xf_task 优先级机制是一种协作式优先级,每次进入调度的时候,优先级提供给调度器一个选择哪个就绪任务运行的依据。
stm32 中有个功能叫优先级分组。其中有两种优先级,一个叫抢占优先级(Preemptive Priority)一个叫子优先级(Sub Priority)。抢占优先级类似 RTOS 里面的优先级,主要的特点是高优先级的会打断低优先级。而子优先级就类似我们说的优先级,只决定同时触发时谁先执行。
- 优先级决定了当不同任务都处于就绪状态时,谁先运行
- 即使优先级再高也要等到当前任务主动让出CPU才能运行
- 优先级的数字越小优先级越高
- 优先级可以通过配置项进行配置
- 优先级可以由用户在运行时动态改变
- 同优先级的任务遵循先入先出的原则
消息队列机制
虽然 xf_task 是协作式调度,这就意味着他可以随便在不同任务间使用全局变量和静态变量,但是消息队列有时候会很好用。于是,我们的 xf_task 支持了两种消息队列机制。
普通消息队列
普通的消息队列在任意的任务都能使用。这部分的代码与核心是解耦的。 所以可以单独拿出来使用。
API 展示
- 消息队列初始化:
C
xf_err_t xf_task_queue_init(xf_task_queue_t *const queue, void *data, const size_t size, const size_t count);- 重置消息队列:
C
xf_err_t xf_task_queue_reset(xf_task_queue_t *const queue);- 判断是否为空:
C
bool xf_task_queue_is_empty(const xf_task_queue_t *const queue);- 获取数据个数:
C
size_t xf_task_queue_count(const xf_task_queue_t *const queue);- 偷看第一个元素:
C
void *xf_task_queue_peek(const xf_task_queue_t *const queue);- 获取剩余空间:
C
size_t xf_task_queue_available(const xf_task_queue_t *const queue);- 发送数据:
C
xf_err_t xf_task_queue_send(xf_task_queue_t *const queue, void *item, const xf_task_queue_mode_t pos);- 删除第一个元素:
C
xf_err_t xf_task_queue_remove_front(xf_task_queue_t *const queue);- 接收一个元素:
C
xf_err_t xf_task_queue_receive(xf_task_queue_t *const queue, void *const buffer);ctask 消息队列
ctask 的消息队列,由于 ctask 可以保存上下文。所以在发送和接受又会有 timeout。 阻塞期间不会耽误别的任务执行。 其 API 参考:ctask 的函数及其用法
时间触发和事件触发
xf task 基本上是可以基于时间触发和事件触发。
时间触发
时间触发在不同的任务中的表现不同:
- ctask:ctask中 的 delay 就经典的时间触发,当然还包括 ctask 版本的消息队列的超时部分
- ntask:ntask 中的 delay 也是时间触发。
- ttask:ttask 的定时器周期是时间触发。
事件触发
相比于时间触发,事件触发则有一个明显的函数:
c
xf_err_t xf_task_trigger(xf_task_t task);该函数是异步的,调用后不会立即执行该任务,等当前任务主动释放 CPU 的时候才会被触发,触发后任务从阻塞态进入就绪态。 用户可以通过该函数触发任何任务,除此之外还有些隐藏的调用:
- ctask:ctask 中消息队列接收到消息后会通过事件触发被阻塞的任务
- ntask: ntask 中 xf_ntask_yield() 会短暂让出 CPU。
另外,ttask 如果主动调用 xf_task_trigger() 函数,不会消耗其循环次数。
紧急任务机制
紧急任务不是一个新的任务。是由原先的任务通过函数:
c
xf_err_t xf_task_set_urgent_task_with_manager(xf_task_manager_t manager, xf_task_t task, bool force);
// or
xf_err_t xf_task_set_urgent_task(xf_task_t task, bool force);- 将已有的任务设置为紧急任务,该紧急任务会在下次调度的时候被优先执行(非优先级)。
- 紧急任务运行完毕后,紧急状态则会被解除。
- 当有多个任务被设置为紧急任务时,如果启用 force ,则会使用最设置任务为紧急任务。如果不启用 force,则会返回 XF_ERR_BUSY 告诉设置失败。
任务饥饿与饥饿度
任务饥饿
由于协作式任务的优先级不能进行抢占。所以,从理想的角度,每个任务不能占用过长的时间。这会导致很多进入就绪任务无法进行执行,以 ntask 为例子。遇到某种算法占用过长时间,我们需要利用:
c
xf_ntask_yield()短暂让出 CPU。 即使这样,也会出现低优先级任务就绪中迟迟无法执行。全都是高优先级任务在执行。 这种情况下,我们称低优先级任务为“饥饿”状态。
饥饿值机制
当任务开启 XF_TASK_HUNGER_ENABLE 时,任务可以使用:
c
void xf_task_feel_hungery_enable(xf_task_t task, uint32_t hunger_time);函数开启饥饿值机制。当任务的超时时间大于指定的饥饿时间,则饥饿的任务会自动上升一个临时优先级直至任务得以执行。该机制主要保证任务不会永远出于饥饿状态。 如果取消紧急任务可以使用如下函数:
c
void xf_task_feel_hungery_disable(xf_task_t task);同步/异步的发布订阅机制
虽然 xf_task 是协作式调度,这就意味着他可以随便在不同任务间使用全局变量和静态变量,但是发布订阅机制有时候确实很方便。于是,我们的 xf_task 支持了同步和异步两种发布订阅机制。
同步发布订阅
C
#define TOPIC_ID 1 // 随便给一个id号
void bus_cb(const void *const data, void *user_data)
{
int num = *(int *)data;
printf("data:%d\n", num);
}
void task_pub(xf_task_t task)
{
static int num = 1;
num++;
// 同步发送(快,但是会阻塞本任务)
xf_task_mbus_pub_sync(TOPIC_ID, &num);
}
void app_main()
{
// 注册 topic
xf_task_mbus_reg_topic(TOPIC_ID, sizeof(int));
// 订阅 topic
xf_task_mbus_sub(TOPIC_ID, bus_cb, NULL);
// 创建一个任务,定时发布消息
xf_ttask_create_loop(task_pub, (void *)1, 1, 2000);
}同步发布订阅是在消息发布的时候立即去执行订阅者这边的回调。 它的优势就是处理速度会很及时,但是如果订阅者过多,或者处理时间过长。此时就会阻塞当前任务的执行。
异步发布订阅
C
#define TOPIC_ID 1 // 随便给一个id号
void bus_cb(const void *const data, void *user_data)
{
int num = *(int *)data;
printf("data:%d\n", num);
}
void task_pub(xf_task_t task)
{
static int num = 1;
num++;
// 异步发送(慢,但是不会阻塞本任务)
xf_task_mbus_pub_async(TOPIC_ID, &num);
}
void app_main()
{
// 注册 topic
xf_task_mbus_reg_topic(TOPIC_ID, sizeof(int));
// 订阅 topic
xf_task_mbus_sub(TOPIC_ID, bus_cb, NULL);
// 创建一个任务,定时发布消息
xf_ttask_create_loop(task_pub, (void *)1, 1, 2000);
}异步发布订阅在发送的时候并不会直接进行触发,而是将发送的消息保存起来后触发内部的 ttask 任务。 然后,等待当前任务执行完。则进行异步回调的执行。
注意:目前的发布订阅机制仅服务于默认的任务管理器。自定义的任务管理器尚且不支持
API 展示
- 注册 topic:
C
xf_err_t xf_task_mbus_reg_topic(uint32_t topic_id, uint32_t size);- 注销 topic:
C
xf_err_t xf_task_mbus_unreg_topic(uint32_t topic_id);- 异步发布消息至 topic:
C
xf_err_t xf_task_mbus_pub_async(uint32_t topic_id, void *data);- 同步发布消息至 topic:
C
xf_err_t xf_task_mbus_pub_sync(uint32_t topic_id, void *data);- 订阅指定 topic:
C
xf_err_t xf_task_mbus_sub(uint32_t topic_id, xf_task_mbus_func_t mbus_cb, void *user_data);- 取消订阅指定 topic:
C
xf_err_t xf_task_mbus_unsub(uint32_t topic_id, xf_task_mbus_func_t mbus_cb);任务池和任务回收机制
当我们大量且多次的创建和删除任务,有可能会导致内存的碎片化。所以,我们对现有的xf_task 设计了任务池机制。
C
xf_task_pool_t tpool = NULL;
static void ttask(xf_task_t task)
{
static int num = 0;
num++;
// 不断的创建任务(由于任务池的存在,所以不会申请内存,反而会回收已经使用完的任务)
printf("ttask:%d\n", num);
if (num < 5) {
xf_task_init_from_pool(tpool, ttask, (void *)1, 1);
} else { // 创建五次后删除任务池
xf_err_t err = xf_task_pool_delete(tpool);
if (err == XF_OK)
{
printf("delete tpool\n");
}
}
}
void app_main()
{
tpool = xf_ttask_pool_create(MAX_WORKERS, 1000, 1);
// 通过任务池创建 ttask 任务
xf_task_init_from_pool(tpool, ttask, (void *)1, 1);
}任务池有以下功能:
- 任务池可以创建 ctask、ntask 和 ttask 任务池。
- 任务池创建好后,可以分别从不同的任务池里初始化任务
- 当任务删除时,任务进入回收
- 任务池中没有任务则会返回 NULL
API 展示
默认任务管理器创建任务池
- 创建 ttask 任务池:
C
xf_task_pool_t xf_ttask_pool_create(uint32_t max_works, uint32_t delay_ms, uint32_t count);- 创建 ntask 任务池:
C
xf_task_pool_t xf_ntask_pool_create(uint32_t max_works);- 创建 ctask 任务池:
C
xf_task_pool_t xf_ctask_pool_create(uint32_t max_works, size_t stack_size);任意任务管理器创建任务池
- 创建 ttask 任务池:
C
xf_task_pool_t xf_ttask_pool_create_with_manager(uint32_t max_works, xf_task_manager_t manager, uint32_t delay_ms, uint32_t count);- 创建 ntask 任务池:
C
xf_task_pool_t xf_ntask_pool_create_with_manager(uint32_t max_works, xf_task_manager_t manager);- 创建 ctask 任务池:
C
xf_task_pool_t xf_ctask_pool_create_with_manager(uint32_t max_works, xf_task_manager_t manager, size_t stack_size);任务池操作函数
- 删除任务池:
C
xf_err_t xf_task_pool_delete(xf_task_pool_t pool);- 从任务池中初始化任务:
C
xf_task_t xf_task_init_from_pool(xf_task_pool_t pool, xf_task_func_t func, void *func_arg, uint16_t priority);裸机和多线程中移植
在 XFusion 中,我们可以随意使用 xf_task 。 另外,xf_task 也支持独立移植。接下来,介绍如何在裸机和多线程中独立的移植 xf_task
手把手教你裸机移植(stm32)
1. 提供一个基础移植工程
我们利用 STM32CUBEMX 配置一个 HAL 库工程。
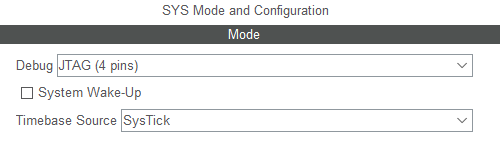
这里配置 debug (根据自己手上调试器不同自行更改)
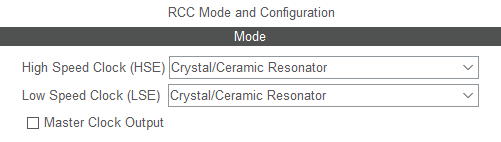
这里配置时钟为外部时钟
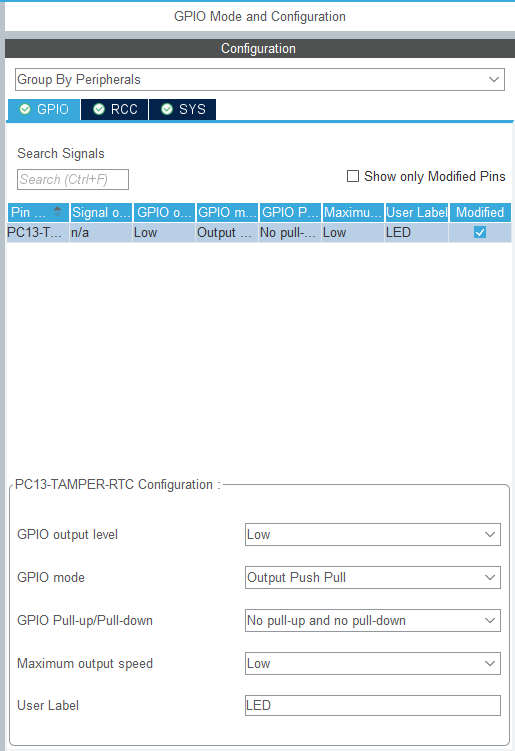
配置 PC13 为推挽输出,方便后续用它做 led 闪烁验证移植完成
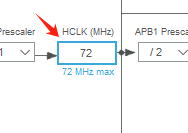
配置 cpu 主频为 72 MHz 。
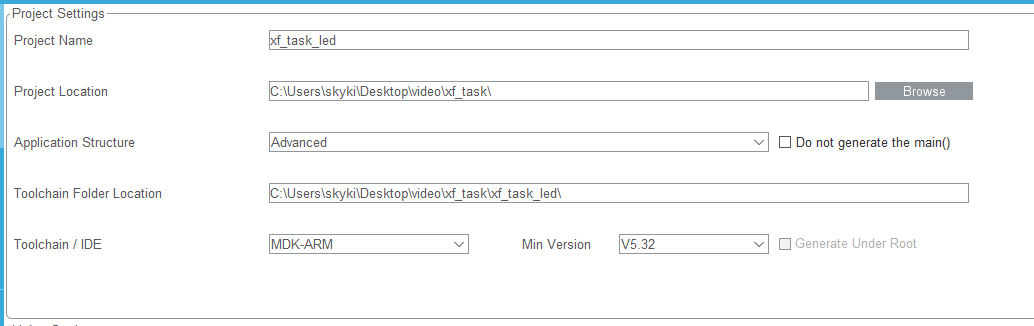
设置导出工程,这里导出 mdk 工程。
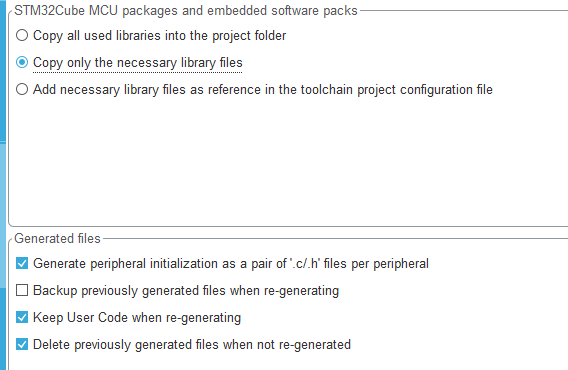
让生成的工程更加简洁。
编译后,无报错,无警告,表示成功。
2. 将 xf_task 加入工程
找到你导出的工程,进入工程目录。利用 git clone 下载 xf_task 和 xf_utils
shell
git clone https://github.com/x-eks-fusion/xf_task.git
git clone https://github.com/x-eks-fusion/xf_utils.git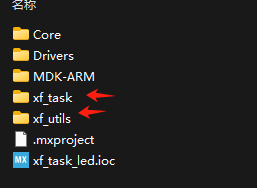
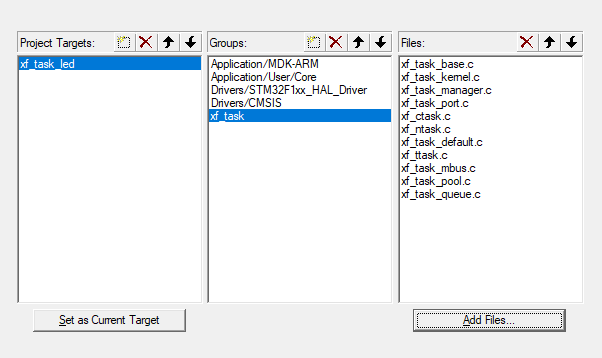
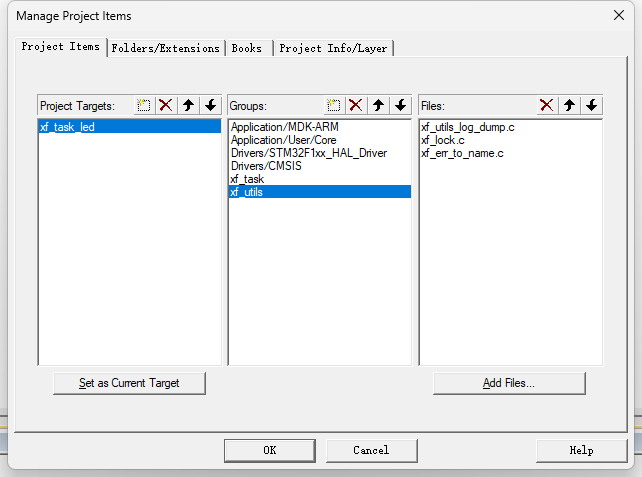
添加 xf_task 到工程里面去
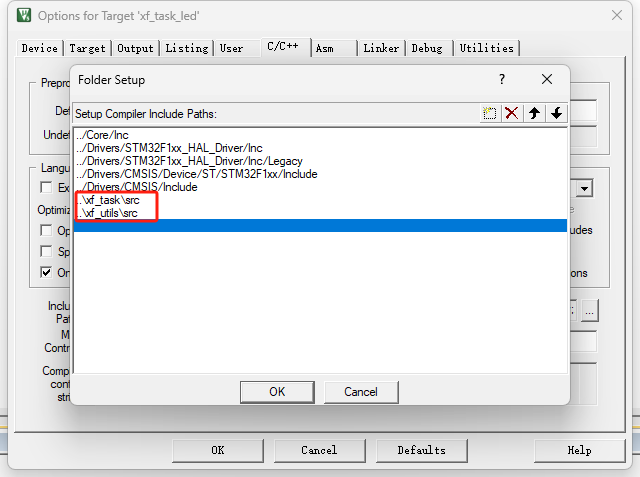
添加 src 到 include path 中
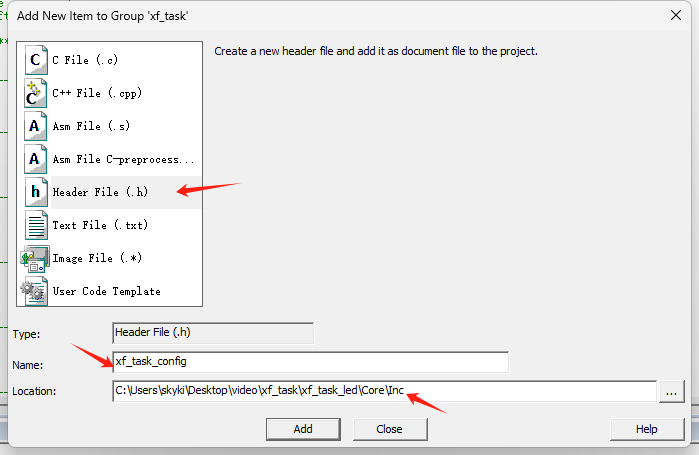
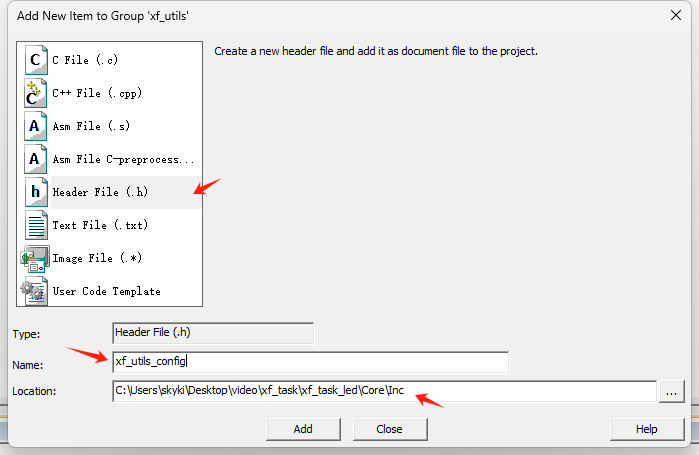

添加用户配置项, xf_task 配置项可以保持默认。xf_utils 的配置项关闭 XF_ATTRIBUTE_ENABLE (改功能需要 gnu 且 xf_task 中没用到)和 XF_LOG_LEVEL (减少占用)。
3. 添加移植代码
首先,添加头文件。
然后,添加对接 ms 级时间戳的函数。
调用函数对接时间戳并初始化默认的任务管理器。
调用默认管理器进行调度
4. 添加 ttask 任务翻转 LED
写一个任务用于循环翻转 LED

在 main 中创建一个 ttask
多线程移植
在多线程中,不同的线程可以运行不同的任务管理器。需要注意如下几个点:
- 每个线程都可以创建属于自己的协程任务管理器
- 不同任务管理器之间需要通过协程间通讯
- 目前发布订阅只能在默认的调度器中使用 同步异步的发布订阅机制
- 除了默认任务管理器,其余创建则需要 xxx_with_manager 版本的函数